影像测量仪信息处理的三个阶段
2016-Mar-09
Marr从视觉理论出发,将影像测量过程划分为自一上而下的,·个阶段,即视觉信息从最初的原始数据(二维图像数据)到最终对三维环境的表示经历
Marr从视觉理论出发,将影像测量过程划分为自一上而下的,·个阶段,即视觉信息从最初的
原始数据(二维图像数据)到最终对三维环境的表示经历三个阶段的处理,如图1-4所示。

第二阶段是中期视觉处理,是在以观测者为中心的坐标系中,由输入图橡和基元图恢复场景可见部分的深度、法线方向、轮廓等。这些信息中包含了深度信息,但不是真正的物体三维表示,因此,称为2.5维图(2.5 dimensional sketch)。2.5维描述是·一种形象的说法,意即部分的、不完整的三维信息描述。当人眼或摄傈机观察周围环境物体时,观察者
对三维物体最初是以自身的坐标系来描述的,另外,我们只能观察到物体的···部分(另··__。部分是物体的背面或被其他物体遮挡的部分)。
第三阶段是后期视觉处理,是在以物体为中心的坐标系中,由输入图慷、基元图、2.5维图来恢复、表示和识别三维物体的过程。这种三维形状描述与观察者视角无关。表1-2总结了视觉信息处理三个阶段的目的和特点。
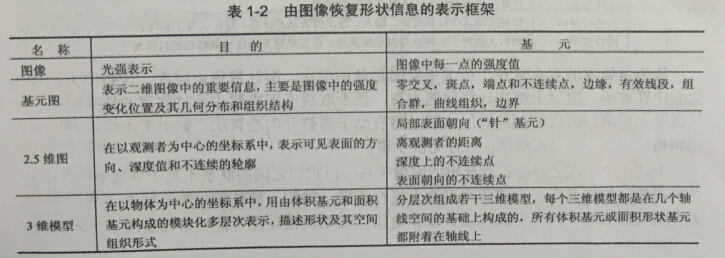
表1-2由图像回复形状信息的框架

